tradingviwede kullanmak için pine editöre yapıştırmamız gereken kodu paylaşabilir misiniz?

 Yeni Üye
Yeni Üye

tradingviwede kullanmak için pine editöre yapıştırmamız gereken kodu paylaşabilir misiniz?
Kıdemli Üye

Başka bir arzunuz var mı?
Burada sadece matriks kodları paylaşılır.
Originally Posted by konur80

Yeni Üye
O1:=OTTC,2,1.4);
AL
O1>REF(O1-1)
SAT
O1<REF(O1-1)
Sanırım böyle birşey kasdediyorsunuz.
Kıdemli Üye
Özledik ustayı
Kıdemli Üye
Efsanelerinden birini de buraya koyalım, hatırlayalım hatırlatalım.
Yeni Üye
Arkadaslar explorer da taramalarımda virgülden sonra 4 basamak cıkıyor.virgulden sonra 2 basamak veya 1 basamak cıkması için formüle ne eklemeliyim ?
mesela değer 9,9875
formüle int yazdıgımda 9,00 oluyor
round yazdıgımda 10,00 oluyor bana 9,98 cıkması lazım
Son düzenleme : sadık; 12-02-2021 saat: 23:33.
 Üye
Üye

c yerine neyi hesaplatacaksanız onu yazın
int(c*10)/10; <====1hane
int(c*100)/100; <====2hane
int(c*1000)/1000; <====3hane
int(c*10000)/10000 <====4hane
algoritma
Sessiz olursan daha çok şey Duyarsın.
Üye
tsk ederim çok iyiki varsınız.
 Gönderi Kuralları
Gönderi Kuralları




 Alıntı yaparak yanıtla
Alıntı yaparak yanıtla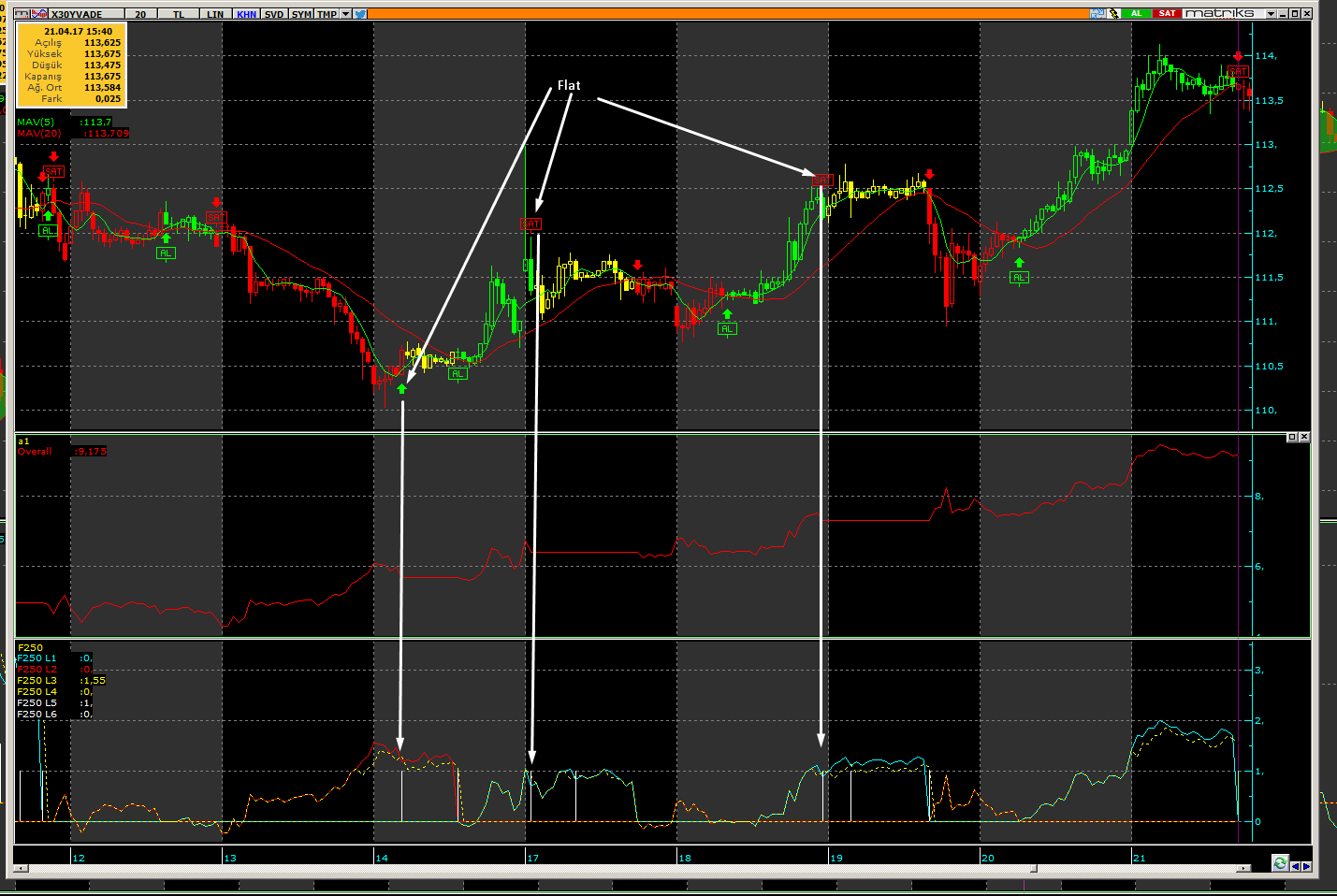

Yer İmleri