Sayın oralet teşekkür ederim.Hata veriyor acaba sebebi ne olabilir?

 Yeni Üye
Yeni Üye

Sayın oralet teşekkür ederim.Hata veriyor acaba sebebi ne olabilir?
Yeni Üye
c:\Users\Administrator\AppData\Local\Temp\2\0jutuu 0e.0.cs(12,17) : error CS1514: { expected
c:\Users\Administrator\AppData\Local\Temp\2\0jutuu 0e.0.cs(12,17) : error CS1519: Invalid token '-' in class, struct, or interface member declaration
c:\Users\Administrator\AppData\Local\Temp\2\0jutuu 0e.0.cs(13,1) : error CS1519: Invalid token '{' in class, struct, or interface member declaration
Hata bu...
 Gümüş Üye
Gümüş Üye

Sistem.SorguBaslik[0] = "Kapanış";Originally Posted by Aslan49

Sistem.SorguBaslik[1] = "Zirve";
Sistem.SorguBaslik[2] = "Dip";
var tara = 250;//Sistem.BarSayisi-1; //Parametreler[0];
var Veriler = Sistem.GrafikFiyatSec("Kapanis");
var HHV = Sistem.HHV(tara,"Yuksek");
var LLV = Sistem.LLV(tara,"Dusuk");
var Son = Veriler[Sistem.BarSayisi-1];
var Zirve = HHV[Sistem.BarSayisi-1];
var Dip = LLV[Sistem.BarSayisi-1];
var FarkZirve = Zirve * 0.97;
var FarkDip = Dip * 1.03;
// filtrele
if (Son < FarkDip || Son > FarkZirve )
{
Sistem.SorguDeger[0] = Sistem.GrafikVerileri[Sistem.BarSayisi-1].Close;
Sistem.SorguDeger[1] = Zirve;
Sistem.SorguDeger[2] = Dip;
if (Son < FarkDip )
Sistem.SorguAciklama = tara+" günlükte Dibe Geldi/yakın";
else if (Son > FarkZirve)
Sistem.SorguAciklama = tara+" günlükte Zirveye Geldi/yakın";
}
else
{
Sistem.SorguAciklama = "Dip/tepe %3 marj dışında";
Sistem.SorguDeger[0] = Sistem.GrafikVerileri[Sistem.BarSayisi-1].Close;
Sistem.SorguDeger[1] = Zirve;
Sistem.SorguDeger[2] = Dip;
}
Sistem.SorguEkle();
Bear_Bull
@BearBull26
 Bronz Üye
Bronz Üye
oralet kım jarmen mı
Senin almaya cesaret edemediğin riskleri alanlar, senin yaşamak istediğin hayatı yaşarlar..
Sokrates twit @erhanacikgoz1
Kıdemli Üye
Benim tek derdim manuel girdiğim emri kar kitleyerek robotun takip etmesi oda olmuyor malesef yıl olmuş 2017 elimde telefonla pozu açayım işime bakarım robot pozu algılasın her 100 puanın 50 puanını izleyen kar al yaparak yoluna devam etsin
Kıdemli Üye
sayın gencparaci
ben de sizin ggibi pozisyonumu kendim açmak istiyorum sonrasında stop u veya karl veya ilerleyen kar al ı robota bırakmak istiyorum ,alış veya satış seviyemi manuel olarak da girebilirim ,
Bullish Engulfing ve Bearish Engulfing
ideal formullerini paylaşabilecek arkadaş olursa seviniriz
Son düzenleme : alekss; 24-08-2017 saat: 11:13.
Yeni Üye
Sayın Bear Bull teşekkürler efendim.Sorgulatıyorum hisselerin RSI ve MOM değeri çıkıyor...Dip-Zirve değerleri çıkmıyor.Neden olabilir acaba...
Gümüş Üye
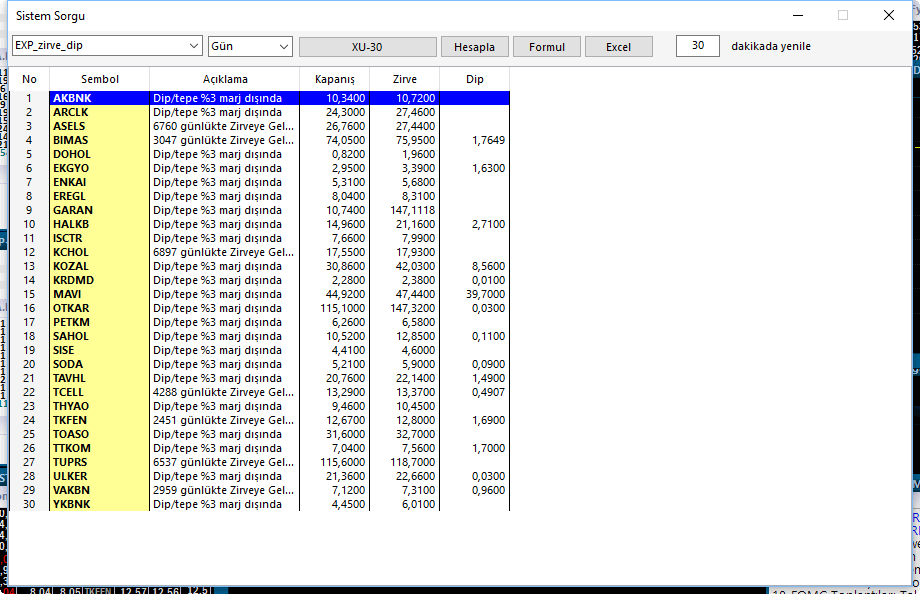
doğru sorguyu çalıştırdığınızda ekrana gelecek döküm aşağıdaki gibidir.
o sistemin içinde ne RSI ne de MOM değerleri var
yani RSI-MOM çıkması imkansız.
%3 dışında olanlar çıkmasın derseniz
bu kod parçacığını sistemden siliniz.
else
{
Sistem.SorguAciklama = "Dip/tepe %3 marj dışında";
Sistem.SorguDeger[0] = Sistem.GrafikVerileri[Sistem.BarSayisi-1].Close;
Sistem.SorguDeger[1] = Zirve;
Sistem.SorguDeger[2] = Dip;
}
Bear_Bull
@BearBull26
 Gönderi Kuralları
Gönderi Kuralları




 Alıntı yaparak yanıtla
Alıntı yaparak yanıtla
Yer İmleri