




Originally Posted by gencparaci
 şu kod daha önce paylaşılmıştı işinize yarayabilir.
şu kod daha önce paylaşılmıştı işinize yarayabilir.
Parametreler kısmını MANUEL doldurmanız gerekmektedir.
//Pozisyon Kontrol Robotu / Girilen Pozisyonun Otomatik Kontrolünü Sağlar Kontrolsüz Zarar Etmenizi Önler
//########################################### YAZAN ###### ERDAL KARAKAŞ
var Sembol_VIP30 = "VIP'VIP-X030";
//Kontrol Edilecek Pozisyon Bilgileri Parametrelerden Alınır.
string Pozisyon_Yonu = Sistem.Parametreler[0]; // Girilen pozisyonun yönü belirlenir Örnek: Satış = S Alış = A
float Lot_Miktari = Convert.ToSingle(Sistem.Parametreler[1]); //Alış/Satış yapılan Aktif Lot Miktarı belirlenir.
float islem_Fiyati = Convert.ToSingle(Sistem.Parametreler[2]); //Lot Alış/Satış fiyatı belirlenir.
float Zarar_Limiti = Convert.ToSingle(Sistem.Parametreler[3])/1000; //Pozisyonda maksimum edilecek zarar seviyesi. Örnek: 300 Puan için = 300
float Kar_Limiti = Convert.ToSingle(Sistem.Parametreler[4]); //Pozisyonda maksimum kar seviyesi belirlenir. Örnek: 1250 Puan için = 1250
float Kar_Alma_Seviyesi = Convert.ToSingle(Sistem.Parametreler[5]); //Pozisyondan alınacak olan kar seviyesi
//string HesapAdi = Sistem.Parametreler[8];
//string AltHesapAdi = Sistem.Parametreler[9];
string SozlesmeAdi = Sistem.Parametreler[10];
var Renk_Kirmizi = Sistem.Renk(250, 250, 0, 0); //Kırmızı
var Renk_Siyah = Sistem.Renk(0, 300, 0, 0); //Siyah
var Renk_Mavi = Sistem.Renk(250, 50, 50, 250); //Mavi
var Renk_Mor = Sistem.Renk(250, 191, 62, 255); //Mor
var Renk_Gri = Sistem.Renk(255, 160, 160, 160); //Gri
var Renk_Yesil = Sistem.Renk(250, 0, 160, 50); //Yeşil
//Anlık VIOP değeri alınır.
float VIP30 = Sistem.SonFiyat(Sembol_VIP30);
if (VIP30 != 0 )
{
//-------------------------------------------------------------------------------------
// Strateji İşlemleri Yapılır.
float Kar_Zarar = 0;
float Stop_Seviyesi = 0;
var Sinyal = 0; // Al, Sat veya Stop sinyali olduğunda değer 1 olur ve pozisyona göre işlem yapılır.
if (Pozisyon_Yonu == "A")
{
Stop_Seviyesi = islem_Fiyati - Zarar_Limiti; //Stop Seviyesi Hesaplanır.
Kar_Zarar = Sistem.SayiYuvarla(((VIP30 - islem_Fiyati) * 1000),1); //Anlık Kar Zarar Durumu Hesaplanır ve Virgülden sonrası yuvarlanır.
}
if (Pozisyon_Yonu == "S")
{
Stop_Seviyesi = islem_Fiyati + Zarar_Limiti; //Stop Seviyesi Hesaplanır.
Kar_Zarar = Sistem.SayiYuvarla(((islem_Fiyati - VIP30) * 1000),1); //Anlık Kar Zarar Durumu Hesaplanır ve Virgülden sonrası yuvarlanır.
}
if ( (Pozisyon_Yonu == "A") || (Pozisyon_Yonu == "S") ) //Robotun Pozisyonda ise hesaplama yapılır.
{
if ( (Kar_Zarar >= 150) && (Kar_Alma_Seviyesi < 50) ) { Kar_Alma_Seviyesi = 50; } //50 TL kar alır //Kar Alma Seviyesi Belirlenir.
if ( (Kar_Zarar >= 200) && (Kar_Alma_Seviyesi < 100) ) { Kar_Alma_Seviyesi = 100; } //100 TL kar alır //Kar Alma Seviyesi Belirlenir.
if ( (Kar_Zarar >= 300) && (Kar_Alma_Seviyesi < 200) ) { Kar_Alma_Seviyesi = 200; } //200 TL kar alır //Kar Alma Seviyesi Belirlenir.
if ( (Kar_Zarar >= 500) && (Kar_Alma_Seviyesi < 250) ) { Kar_Alma_Seviyesi = 250; } //250 TL kar alır //Kar Alma Seviyesi Belirlenir.
}
//-----------------------------------------------------------------------------------------
//Stop ve Kar Alma Seviyeleri kontrol edilir. Duruma göre pozisyon kapatılır.
if (Pozisyon_Yonu == "A") //Pozisyon Alış Yönde ise
{
if (VIP30 < Stop_Seviyesi) { Sinyal = 1; } //Stop Seviyesi Geçilmiş ise Pozisyon Kapatılır.
if (Kar_Zarar >= Kar_Limiti) { Sinyal = 1; } //Maksimum Kar Limitine Gelinmiş ise Pozisyon Kapatılır.
if ( (Kar_Alma_Seviyesi > 0) && (VIP30 <= (islem_Fiyati + (Kar_Alma_Seviyesi/1000))) ) { Sinyal = 1; } //Kar Alma Seviyesi Geçilmiş ise Pozisyon Kapatılır.
}
if (Pozisyon_Yonu == "S") //Pozisyon Satış Yönde ise
{
if (VIP30 > Stop_Seviyesi) { Sinyal = 1; } //Stop Seviyesi Geçilmiş ise Pozisyon Kapatılır.
if (Kar_Zarar >= Kar_Limiti) { Sinyal = 1; } //Maksimum Kar Limitine Gelinmiş ise Pozisyon Kapatılır.
if ( (Kar_Alma_Seviyesi > 0) && (VIP30 >= (islem_Fiyati - (Kar_Alma_Seviyesi/1000))) ) { Sinyal = 1; } //Kar Alma Seviyesi Geçilmiş ise Pozisyon Kapatılır.
}
//Stop ve Kar Alma Seviyeleri kontrol edilir. Duruma göre pozisyon kapatılır. BİTTİ
//-------------------------------------------------------------------------------------
// Strateji İşlemleri Yapılır. BİTTİ
//----------------------------------------------------------------------------------
//--------------------------------------------------------------------------------
// AL - SAT İşlemleri Yapılır.
if (Sistem.HaftaSonu == false) { //Hafta Sonu Kontrolü Yapılır.
if (Sistem.BaglantiVar == true) { //iDeal Bağlantı Kontrolü Yapılır.
if (Sistem.SaatAraligi("09:30", "18:14") ) { //Zaman Kontrolü Yapılır, Seans Saatleri
if ( (Sinyal == 1) && (Lot_Miktari != 0) && (Pozisyon_Yonu != "F")) // Sinyal ve Parametre Kontrolü Yapılır.
{
//Sistem.EmirHesapAdi = HesapAdi;
//Sistem.EmirAltHesap = AltHesapAdi;
Sistem.EmirSembol = SozlesmeAdi;
if (Pozisyon_Yonu == "A") { Sistem.EmirIslem = "Satış"; } else { Sistem.EmirIslem = "Alış"; }
Sistem.EmirMiktari = Lot_Miktari;
Sistem.EmirSuresi = "GUN"; // GUN, SNS, IKG
Sistem.EmirTipi = "NORMAL"; // NORMAL, KPY, KIE, GIE, SAR
Sistem.EmirFiyati = "Aktif";
Sistem.EmirFiyatTipi = "PYS"; // PYS, LMT, EIF, KAP
Sistem.EmirGonder();
Pozisyon_Yonu = "F"; //Pozisyon Kapatıldığı için Parametre Değerine Flat ifadesi atanır.
Sistem.Parametreler[1] = "0"; //Pozisyon Kapatıldığı için Parametre Değerine 0 atanır.
Kar_Alma_Seviyesi = 0; //Pozisyon Kapatıldığı için Parametre Değerine 0 atanır.
} // AL - SAT İşlemleri Yapılır. BİTTİ
//-----------------------------------------------------------------------------------------------------------------
}//HaftaSonu
}//Bağlantı
}//Saat
//----------------------------------------------------------------------------------
// Ekrana Robot ile ilgili Çeşitli Bilgiler Yazılır.
Sistem.ZeminYazisiEkle("Pozisyon Yönü ", 1, 165, 43, Renk_Siyah, "Tahoma", 7);
Sistem.ZeminYazisiEkle("Lot miktarı ", 1, 165, 55, Renk_Siyah, "Tahoma", 7);
Sistem.ZeminYazisiEkle("İşlem Fiyatı ", 1, 165, 67, Renk_Siyah, "Tahoma", 7);
Sistem.ZeminYazisiEkle("Stop Seviyesi ", 1, 165, 79, Renk_Siyah, "Tahoma", 7);
Sistem.ZeminYazisiEkle("Kar Alma Seviyesi ", 1, 165, 91, Renk_Siyah, "Tahoma", 7);
Sistem.ZeminYazisiEkle("Kar-Zarar (Puan) ", 1, 165, 103, Renk_Siyah, "Tahoma", 7);
Sistem.ZeminYazisiEkle("Kar-Zarar (TL) ", 1, 165, 115, Renk_Siyah, "Tahoma", 7);
//Sisteme ait Sonuçlar ve Strateji Ekrana Yazılır.
if (Pozisyon_Yonu == "A") { Sistem.ZeminYazisiEkle(": Alış ", 1, 265, 43, Renk_Mavi, "Tahoma", 7); } //Piyasa Yönü
if (Pozisyon_Yonu == "S") { Sistem.ZeminYazisiEkle(": Satış ", 1, 265, 43, Renk_Kirmizi, "Tahoma", 7); } //Piyasa Yönü
if (Pozisyon_Yonu == "F") { Sistem.ZeminYazisiEkle(": Pozisyon Kapalı ", 1, 265, 43, Renk_Mor, "Tahoma", 7); } //Piyasa Yönü
Sistem.ZeminYazisiEkle(": " + Lot_Miktari.ToString(), 1, 265, 55, Renk_Mor, "Tahoma", 7); //Lot Miktarı
Sistem.ZeminYazisiEkle(": " + islem_Fiyati.ToString(), 1, 265, 67, Renk_Mor, "Tahoma", 7); //İşlem Fiuyatı
Sistem.ZeminYazisiEkle(": " + Stop_Seviyesi.ToString(), 1, 265, 79, Renk_Kirmizi, "Tahoma", 7); //Stop Seviyesi
Sistem.ZeminYazisiEkle(": " + Kar_Alma_Seviyesi.ToString() + " Puan", 1, 265, 91, Renk_Yesil, "Tahoma", 7); //Kar Alma Seviyesi
if (Kar_Zarar >= 0) { Sistem.ZeminYazisiEkle(": " + Kar_Zarar.ToString() + " Puan", 1, 265, 103, Renk_Yesil, "Tahoma", 7); } //Kar Zarar Durumu Puan +
if (Kar_Zarar < 0) { Sistem.ZeminYazisiEkle(": " + Kar_Zarar.ToString() + " Puan", 1, 265, 103, Renk_Kirmizi, "Tahoma", 7); } //Kar Zarar Durumu Puan -
if (Kar_Zarar >= 0) { Sistem.ZeminYazisiEkle(": " + ((Kar_Zarar/10)*Lot_Miktari).ToString() + " TL", 1, 265, 115, Renk_Yesil, "Tahoma", 7); } //Kar Zarar Durumu Puan +
if (Kar_Zarar < 0) { Sistem.ZeminYazisiEkle(": " + ((Kar_Zarar/10)*Lot_Miktari).ToString() + " TL", 1, 265, 115, Renk_Kirmizi, "Tahoma", 7); } //Kar Zarar Durumu Puan -
if (Pozisyon_Yonu != "F") // Pozisyon kapalı ise çizgiler kapatılır.
{
Sistem.Cizgiler[0].Deger = Sistem.Liste(islem_Fiyati); Sistem.Cizgiler[0].Aciklama = "İşlem Fiyatı"; Sistem.Cizgiler[0].Kalinlik = 2; Sistem.Cizgiler[0].Renk = Renk_Mavi;
Sistem.Cizgiler[1].Deger = Sistem.Liste(Stop_Seviyesi); Sistem.Cizgiler[1].Aciklama = "Stop Seviyesi"; Sistem.Cizgiler[1].Kalinlik = 2; Sistem.Cizgiler[1].Renk = Renk_Kirmizi;
//Kar Alma Çizgisi Ekrana Çizdirilir.
if ( (Pozisyon_Yonu == "A") && (Kar_Alma_Seviyesi >0) ) { Sistem.Cizgiler[2].Deger = Sistem.Liste(islem_Fiyati + (Kar_Alma_Seviyesi/1000)); Sistem.Cizgiler[2].Aciklama = "Kar Seviyesi"; Sistem.Cizgiler[2].Kalinlik = 2; Sistem.Cizgiler[2].Renk = Renk_Yesil; }
if ( (Pozisyon_Yonu == "S") && (Kar_Alma_Seviyesi >0) ) { Sistem.Cizgiler[2].Deger = Sistem.Liste(islem_Fiyati - (Kar_Alma_Seviyesi/1000)); Sistem.Cizgiler[2].Aciklama = "Kar Seviyesi"; Sistem.Cizgiler[2].Kalinlik = 2; Sistem.Cizgiler[2].Renk = Renk_Yesil; }
}
// Ekrana Robot ile ilgili Çeşitli Bilgiler Yazılır. BİTTİ
//---------------------------------------------------------------------------------------
} //VIP30 Değişkeni 0 Sıfır kontrolü
//Kontrol Edilecek YENİ Pozisyon Bilgileri Parametrelere Aktarılır.
Sistem.Parametreler[0] = Pozisyon_Yonu; // Girilen pozisyonun yönü belirlenir Örnek: Satış = S Alış = A
Sistem.Parametreler[2] = islem_Fiyati.ToString(); //Lot Alış/Satış fiyatı belirlenir.
Sistem.Parametreler[5] = Kar_Alma_Seviyesi.ToString(); //Pozisyondan alınacak olan kar seviyesi. Örnek: 300 Puan için = 300

 Alıntı yaparak yanıtla
Alıntı yaparak yanıtla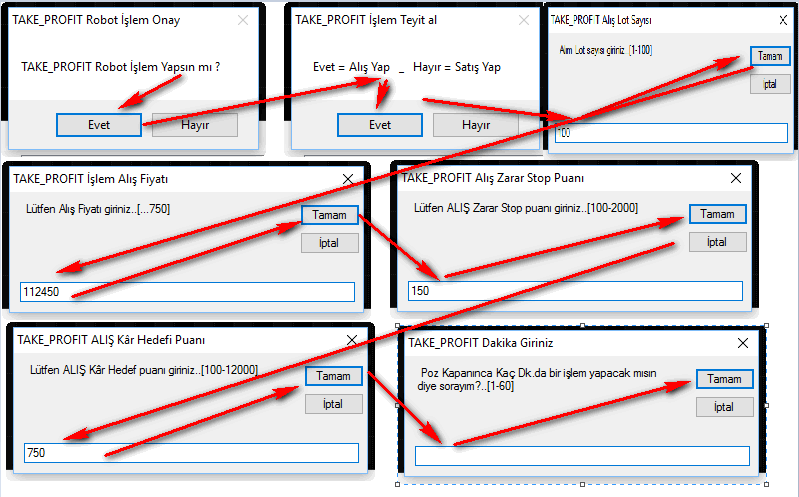




")




Yer İmleri